به گزارش ایسنا و به نقل از نیو اطلس، همچنان که ما به بررسی و کاوش در سیارات دیگر میپردازیم، میخواهیم نه تنها از آنچه در سطح آنها است، بلکه از آنچه که در زیر سطح آنها وجود دارد نیز مطلع شویم. اینجاست که "Mole-bot" وارد میشود که رباتی است که به طور خودکار میتواند در سطح هر سیارهای تونل بزند.
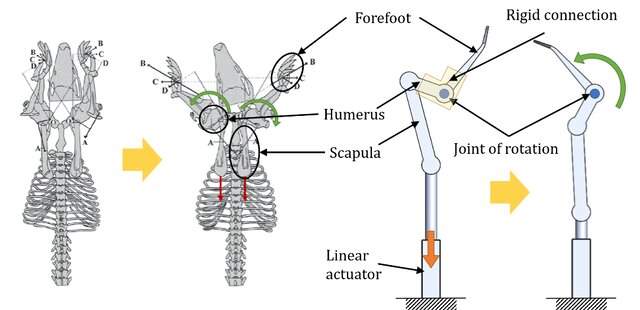
در ساخت این ربات که در موسسه پیشرفته علوم کره(KAIST) توسعه یافته از موش کور اروپایی و موش صحرایی آفریقایی الهام گرفته شده است. دومی با دندانهای برنده و قوی خود زمین را حفاری میکند، در حالی که اولی از پنجههای قدرتمند خود برای پراکنده کردن خاکهای حفر شده به پشت خود استفاده میکند.
این ربات به جای دندان، یک نوع مته پروانهای بسط پذیر دارد. تیغههای دندانهدار و تاشوی این پروانه موقع حفر تونل، به تدریج گسترش مییابند تا تونلی حفر شود که از بدنه استوانهای ربات پهنتر باشد. در مرحله بعد، به جای پنجه، ربات از دو لبه فلزی لولایی که در دو طرف مته قرار دارد، استفاده میکند تا خاک حفر شده را به عقب براند.

گفتنی است که مته و لبهها به طور متناوب کار میکنند، به طوری که دخالتی در کار هم ندارند و مخل عملکرد یکدیگر نمیشوند.
سه زنجیره(مانند سیستم انتقال تانک) در قسمت عقب "Mole-bot" آن را به جلو میرانند و قسمت میانی یا کمر این ربات میتواند تغییر جهت را در هنگام تونل زدن ممکن سازد.
در کنار استفاده از این ربات در سیارات دیگر، ممکن است بتوان از آن در صنعت معدن نیز بهره جست، چرا که ادعا میشود در مقایسه با سیستمهای حفاری موجود، ارزانتر و کارآمدتر است و سازگاری بیشتری با محیط زیست دارد.
نمونه اولیه فعلی که نسخه سوم این ربات است، 84 سانتی متر طول و 25 سانتی متر عرض دارد و وزن آن 26 کیلوگرم است.
پروفسور "هیون میونگ" سرپرست این پروژه میگوید: ما با این نوع ربات حفاری منتظر اکتشافات کارآمدتر منابع هستیم. ما همچنین امیدواریم که "Mole-bot" از نظر طیف کاربردهای گسترده و امکان سنجی اقتصادی تأثیر بسیار مثبتی بر بازار رباتیک بگذارد.
