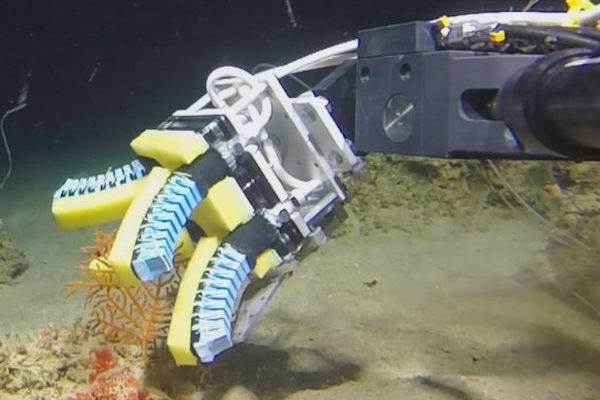
بازو های رباتیکی که برای برخی از زیردریاپیما ها درنظر گرفته میشود این امکان را بوجود میآورد که اپراتورها بتوانند از راه دور آنها را کنترل کرده و برخی فعالیتها را زیر آب به انجام برسانند. تصور کنید بازو های خشک فلزی چگونه می توانند با اشیاء نرم نظیر عروسهای دریایی یا مرجانها تماس برقرار کنند.
از این رو نیاز است که شئی نرمتر برای لمس این موجودات زنده و ظریف در نظر گرفته شود. حال تیم تحقیقاتی موسسه Wyss دانشگاه هاروارد موفق شده اند بازو های رباتیک نرمی توسعه دهند که میتوانند با چابکی بی نظیری زیر آب حرکت کنند و نمونه گیری یا بررسی جانوران آبزی را ممکن سازند.
دانشمندان مؤسسه یاد شده چند وقتی است که بازو های رباتیک زیادی برای تحقیقات دریایی فراهم میکنند اما ساختهی جدید این تیم جالبتر از دیگر اختراعاتشان به شمار میرود.
بازوی جدید به یک دستکش با سنسورهای بی سیم مجهز شده و دانشمندان میتوانند با تکان دادن دستهایشان، بازو را زیر آب کنترل کرده و به بررسی محیط پیرامون بپردازند.
اپراتورها میتوانند با خم کردن، چرخاندن مچ دست خود، بازو را تکان دهند. علاوه بر این آنها می توانند بستن یا باز کردن انگشت سبابه، گیره های ربات را کنترل کنند. متد جدید و استفاده از دست،، اختیار عمل بیشتری در اختیار محققان میگذارد چرا که پیشتر آنها تنها میتوانستند با کمک جوی استیک یا کنترلر، رباتها را کنترل کنند.
دیوید گروبر یکی از محققان تیم تحقیقاتی موسسه Wyss دانشگاه هاروارد درباره ی بازوی رباتیک جدید میگوید:
«بازوهای رباتیک قدیمی برای اکتشاف گاز و نفت زیر آب طراحی شدهاند و در این زمینه کارایی بالایی دارند اما نمیتوان از آن ها برای بررسی یا نمونهگیری از جانوران دریایی استفاده کرد. بهره گیری از بازوهای قدیمی برای چنین عملکردی مثل این است که برای بلند کردن یک دستمال کاغذی از یک چنگک فلزی استفاده کنید.»
