در حال حاضر پروژههای زیادی وجود دارند که سعی میکنند روند حرکتی حشرات واقعی را درنظر گرفته و آنها را شبیهسازی کنند اما مشکل اینجاست کامپیوترها و منطقشان هنوز در خلق و تطبیق روند حرکتی کوچکترین حشرات نیز مشکل دارند و نتوانستهاند قانع کننده ظاهر شوند. حال پروژه ای از گروه Tokyo Tech آفریده شده که توانسته قدمی بلند در این زمینه بردارد و با طراحی الگوریتمی، راه رفتن به شیوهی حشرات را بازآفرینی کند.
سرپرست و محقق ارشد Tokyo Tech دربارهی این ربات میگوید:
شاید هیجانانگیزترین لحظه از این تحقیق در زمان نمایش رباتمان بود. ما قدم برداشتن آن را مشاهده میکردیم و قدمی یا حرکتی که طراحی نکرده ایم و انتظارش را نداشتیم، میدیدیم. بعدها با بررسی آنها متوجه میشدیم که این نوع حرکت به خصوص در برخی حشرات وجود دارد.
البته میتوان هوش مصنوعی پیچیدهای طراحی نمود تا بتواند حرکت در هزاران موقعیت را ممکن سازد اما اگر ذهن حشرات واقعی که به اندازهی یک دانه شنی است، قادر باشد در هر وضعیت سریعتر آداپته شود پس باید راه آسانتری نیز وجود داشته باشد.
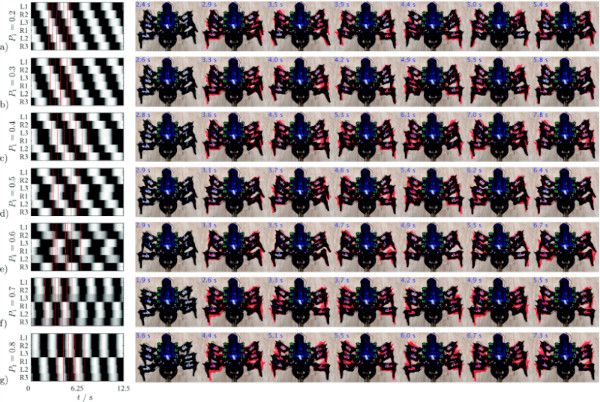
این مطلبی بود که تیم تحقیقاتی مذکور با ساخت ربات شش پای خود به دنبال آن بودند و سعی میکردند راهی مناسب برای این وضعیت بیافرینند. روش عملکرد روبات یاد شده بدین شکل است که یک مولد الگوی مرکزی، سیگنال اصلی را میسازد. سپس سیگنال ساخته شده به وسیلهی آرایههای آنالوگ ترجمه شده و فرمانهای لازم برای حرکت ربات را به نوسانگرهایش میرسانند. بدین ترتیب با تغییر حتی یکی از 5 پارامتر اصلی، آرایهها قادرند جریان و روند حرکتی را مجدداً تنظیم کرده و یک روند قدم زدن مفید را بیافرینند.
به گفتهی سرپرست و محقق ارشد این پروژه، جنبهی مهم سیستم کنترل کنندهی رباتشان این است که ویژگیهای بسیار پیچیدهای را در پارامترهای محدود و مهمی گنجانده است که میتوان با استفاده از آنها سرعت، حالت حرکتی، قدم یا گام را تنظیم نمود.
