به گزارش ایسنا و به نقل از وب سایت رسمی دانشگاه استنفورد، پژوهشگران سعی دارند روشهای بهتر و سریعتری برای راهنمایی رباتهای خودکار توسط انسانها ارائه دهند.
برای افزایش سرعت خودرو در یک بازی رایانهای، فشار آوردن به پدال گاز کافی است. هیچ دستورالعمل خاصی در این مورد به خودرو گفته نشده و حرکت مستقیم، امری بداهه است. این مثال ساده که شاید در دنیای بازی رایانهای، سرگرمکننده به نظر برسد، پژوهشگران دانشگاه استنفورد را ترغیب کرد تا راه بهتری برای تنظیم سیستم خودروهای خودران ارائه دهند.
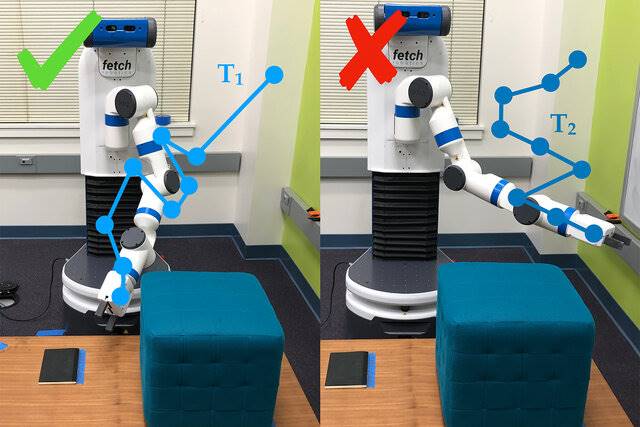
"درسا صدیق" (Dorsa Sadigh)، استادیار علوم رایانه و مهندسی برق دانشگاه استنفورد و همکارانش، دو روش متفاوت مشخص برنامهریزی برای هدف را ترکیب کردند تا رباتها را در یک فرآیند آموزش دهند. در آزمایش این روش، رباتها هم در شبیهسازیها و هم در دنیای واقعی توانستند عملکرد بهتری داشته باشند.
"اندی پالان"(Andy Palan)، استادیار علوم رایانه و از نویسندگان این پژوهش گفت: در آینده، سیستمهای خودران بیشتری وجود خواهند داشت که لازم است مفهوم خوب و بد را درک کنند. اگر بخواهیم سیستمهای خودران را در آینده به کار بگیریم، قابلیت درک مفهوم خوب و بد، امری ضروری خواهد بود.
سیستم جدیدی که پژوهشگران برای بهبود شیوه راهنمایی ابداع کردهاند، طوری طراحی شده که انسانها بتوانند کار درست و نحوه رفتار مناسب را به رباتها آموزش دهند.
صدیق افزود: هدف ما این است که بهترین بازخورد را هم در آزمایشها و هم در دنیای واقعی دریافت کنیم و با ترکیب دادههای دو آزمایش، عملکرد مورد نظر انسان را بهتر به آنها آموزش دهیم.
صدیق در پژوهش پیشین خود، از شرکتکنندگان خواست تا مسیریابی با خودروی خودران را در دو مسیر مقایسه کنند. اگرچه این روش کارآمد است اما نمیتواند دستورالعملهای لازم را برای راهنمایی سیستمهای پیچیدهای مانند خودرو فراهم کند.
پژوهشگران برای افزایش سرعت خودرو، روشی ابداع کردند تا امکان ارائه چندین درخواست را به صورت یکجا فراهم کنند. این درخواستها به گونهای بودند که ربات بتواند به سرعت به آنها پاسخ بدهد. این روش در مقایسه با ارائه یک به یک سوالات، بین 15 تا 50 برابر سریعتر بود.
این سیستم جدید برای آموزش ربات، رفتار انسان را به آن نشان میدهد؛ در نتیجه رباتهای خودکار میتوانند اطلاعات زیادی دریافت کنند اما مشکل اصلی آنها این است که نمیتوانند قسمتهای مهم را تشخیص دهند. البته انسانها نیز همیشه انتظار ندارند که رباتها دقیقاً همان گونه که آموزش دیدهاند، رفتار کنند.
"اردم بی یک"(Erdem Biyik)، دانشجوی مهندسی برق دانشگاه استنفورد و از نویسندگان این پژوهش گفت: ما همیشه نمیتوانیم اطلاعات را به ربات بدهیم و حتی اگر بتوانیم، اغلب نمیتوانیم به همه اطلاعاتی که انسانها ارائه میدهند اعتماد کنیم. پژوهشهای پیشین نشان دادهاند که انسانها انتظار دارند خودروهای خودران با سرعتی کمتر از خود آنها رانندگی کنند.
همین موضوع، دلیل مهمی برای آغاز این پژوهش بود تا روشی برای تقلید رفتار انسان ارائه شود. پژوهشگران در این بررسی، کار خود را با یک درخواست از ربات آغاز کردند اما برنامه اصلی آنها، بررسی با کمک چندین درخواست در آزمایشهای بعدی بود. در پایان آزمایش، 80 درصد شرکتکنندگان، نحوه عملکرد ربات را پس از آموزش آن با سیستم جدید، ترجیح دادند.
این سیستم جدید، با دشواریهایی نیز همراه بود. کسانی که از این روش ترکیبی استفاده کردند، در درک عملکرد سیستم برای پاسخ به درخواستها، دچار مشکل شدند. نظر پژوهشگران این بود که بروز چنین مشکلاتی در سیستمهای مبتنی بر یادگیری، طبیعی است و امیدوارند که این نقصها جبران شوند و امکان عملکرد ساده و سریع را برای رباتها فراهم کنند.
پالان افزود: وقتی 100 آینده را مجسم میکنم، نمیدانم روش درست برای تنظیم عملکردها، دقیقاً چه میتواند باشد. قابلیت طراحی عملکردها برای سیستمهای خودران، موضوع مهمی است که نتوانسته توجه پژوهشگران را به قدر کافی به خود جلب کند.
تغییرات ایجاد شده در سیستم، برای این گروه پژوهشی جالب است زیرا این تغییرات به انسانها امکان میدهند به صورت همزمان، عملکردهای گوناگون را برای شرایط متفاوت ایجاد کنند. برای مثال، شاید شخصی بخواهد در ترافیک، آرام و محافظهکارانه حرکت کند و یا هنگامی که ترافیک سبکتر است، با سرعت زیادی براند.
صدیق ادامه داد: این پژوهش، گامی به سوی درک بهتر اهداف انسان و انتظارات آنها از یک ربات است. پژوهش ما میتواند امکان تعامل ساده با رباتها و آموزش آنها را برای انسان فراهم کند و من مشتاقانه میگویم که در آینده، پژوهشهای بیشتری در مورد یادگیری انسانها و رباتها از یکدیگر انجام خواهیم داد.
این پژوهش، در "نشست رباتیک: علوم و سیستمها" (RSS) ارائه خواهد شد.
